http://cs.cmu.edu/~aayushb/localization/
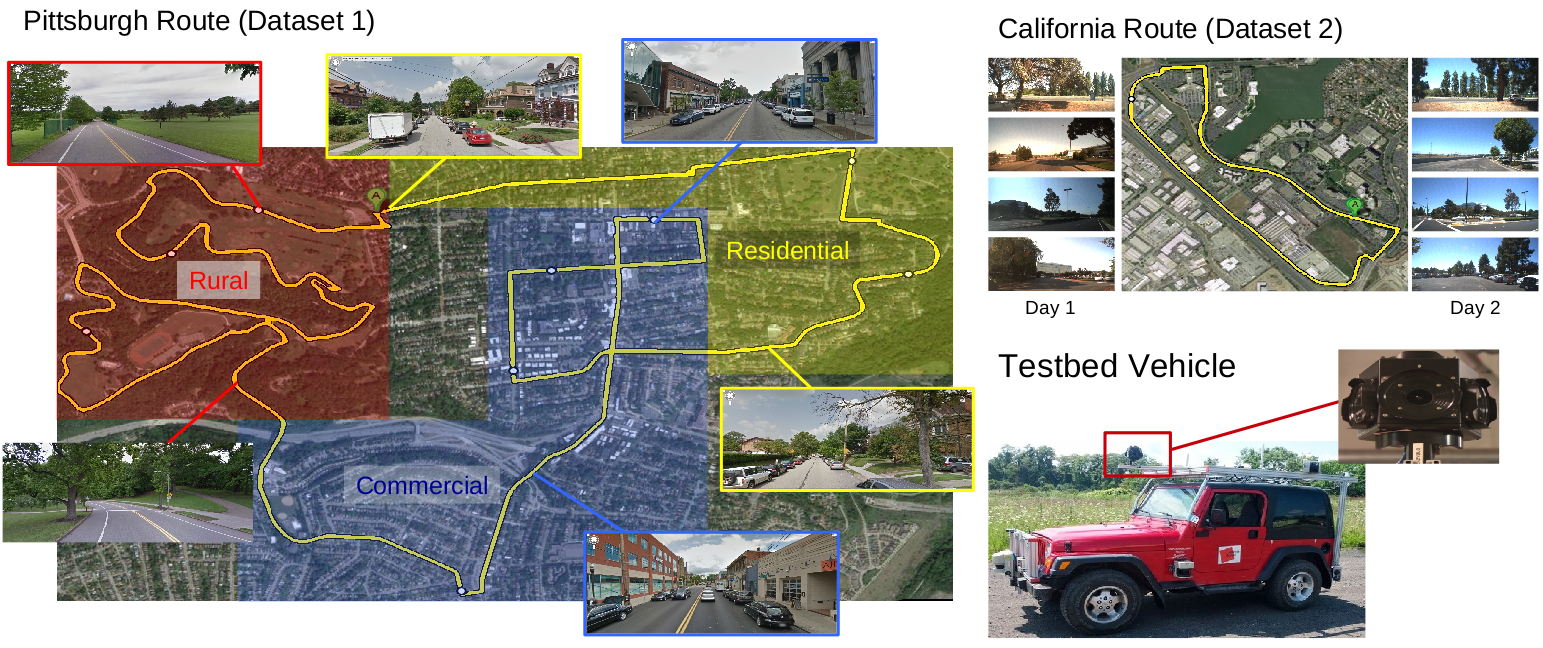
Understanding How Camera Configuration and Environmental Conditions Affect Appearance-based Localization
Presented at IV 2014
People
Abstract
Localization is a central problem for intelligent vehicles. Visual localization can supplement or replace GPS-based localization approaches in situations where GPS is unavailable or inaccurate. Although visual localization has been demonstrated in a variety of algorithms and systems, the problem of how to best configure such a system remains largely an open question. Design choices, such as "where should the camera be placed?" and "how should it be oriented?" can have substantial effect on the cost and robustness of a fielded intelligent vehicle. This paper analyzes how different sensor configuration parameters and environmental conditions affect visual localization performance with the goal of understanding what causes certain configurations to perform better than others and providing general principles for configuring systems for visual localization. We ground the investigation using extensive field testing of a visual localization algorithm, and the data sets used for the analysis are made available for comparative evaluation.
Paper
|
|
IV paper (pdf, 1.9MB) More details are here in RI-CMU Tech Report
Citation |
Video
Dataset
1. Seasonal Variation Dataset (Funded by Korean ADD) |
Funding
This research was sponsored by the Volkswagen Group of America Electronics Research Lab.
Comments, questions to Aayush Bansal